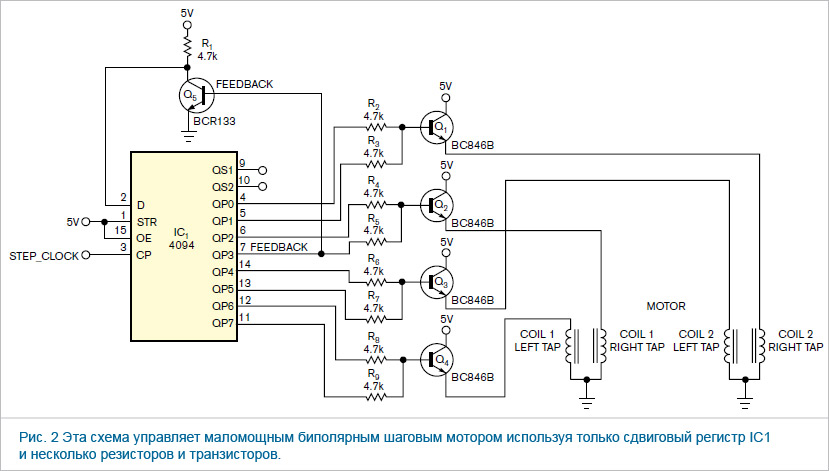
Схема управления для шагового двигателя схемы

Как подключить шаговый двигатель
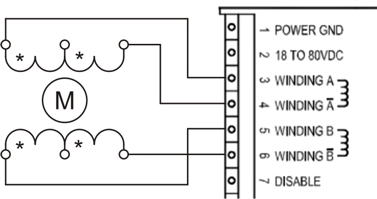
Схема подключения 6-ти выводного шагового двигателя к драйверу GeckoDrive биполярное последовательное подключение обмоток. Схема подключения 8-ми выводного ШД с биполярным параллельным соединением обмоток к драйверу GeckoDrive. Схема подключения 8-ми выводного ШД с биполярным последовательным соединением обмоток к драйверу GeckoDrive. Мы рады предложить Вам шаговые двигатели , блоки управления, источники питания и другую продукцию со склада в Санкт-Петербурге по самым привлекательным ценам.





.jpg "Main Russian menu")







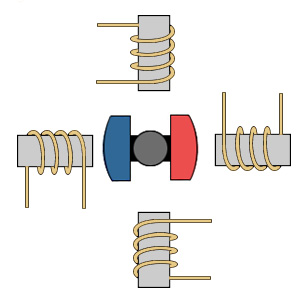
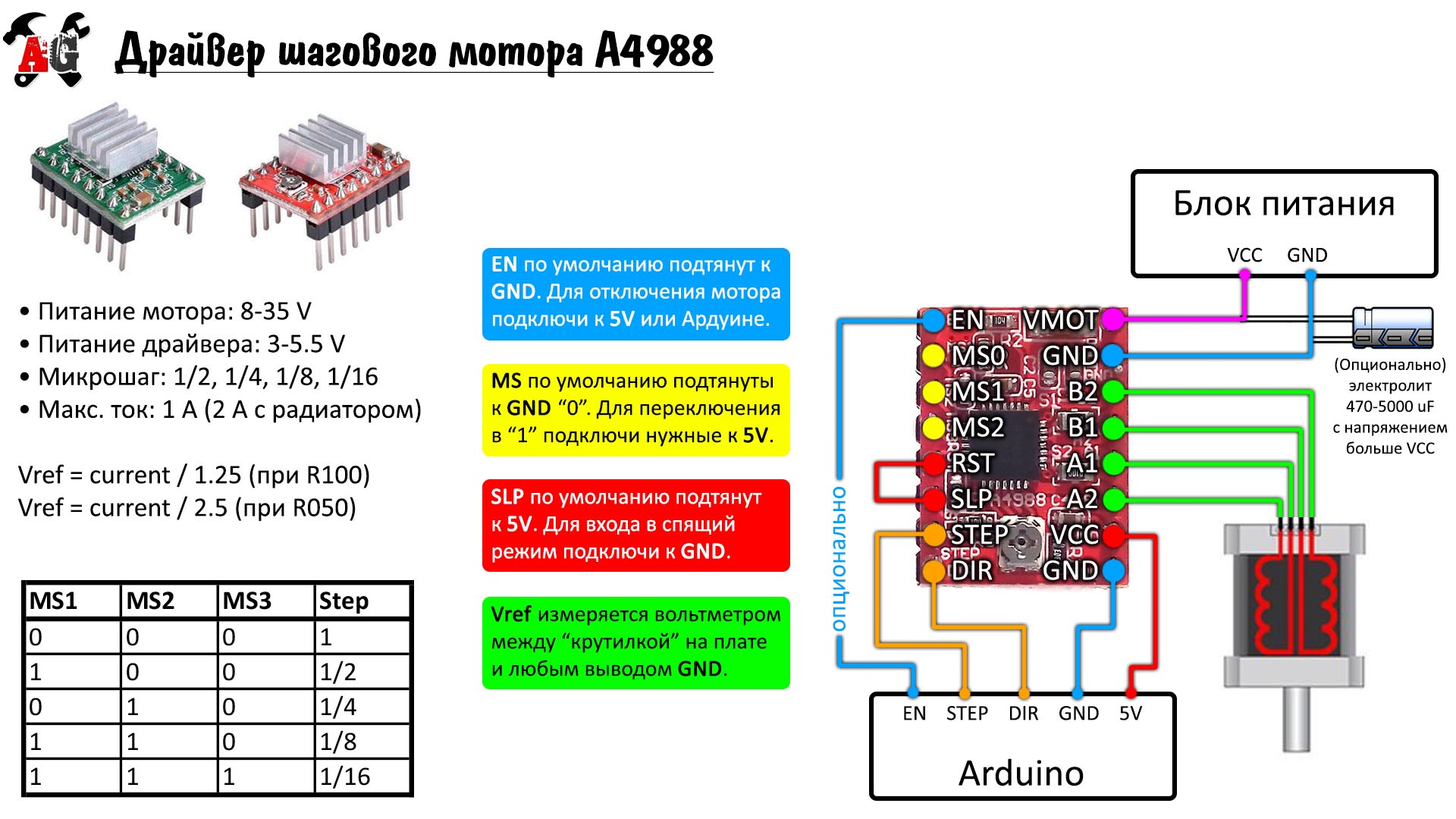
Современные шаговые двигатели, гибридые либо ШД на постоянных магнитах, как правило, производятся с двумя обмотками 4 вывода , с двумя обмоткми и центральными отводами 6 либо 5 выводов и с четырьмя обмотками 8-ми выводные ШД. Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода. Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер т. Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов. В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности.








Аннотация: В настоящее время хорошей альтернативой микроприводам, состоящим из быстроходного двигателя с обратной связью и механического редуктора, является шаговый электропривод, ставший уже традиционным исполнительным устройством многих электронных приборов и систем. Предметом исследования в данной работе является шаговый двигатель. В данной работе объектом управления ОУ является двухкоординатный транспортный модуль на основе линейных шаговых двигателей ЛШД , который применяется для изготовления микросхем высокой степени интеграции. Для этой цели используется зондовая установка, включающая в себя двухкоординатный транспортный модуль. В данной работе при проектировании системы применима методика управления режимом полного шага для линейного шагового двигателя.